A robot combining tether and aerial locomotion to explore forest canopies.
22.11.2022Congratulations to Steffen for its novel multi-modal robot that was a finalist for Best Paper on Agri-robotics at IROS 2022!
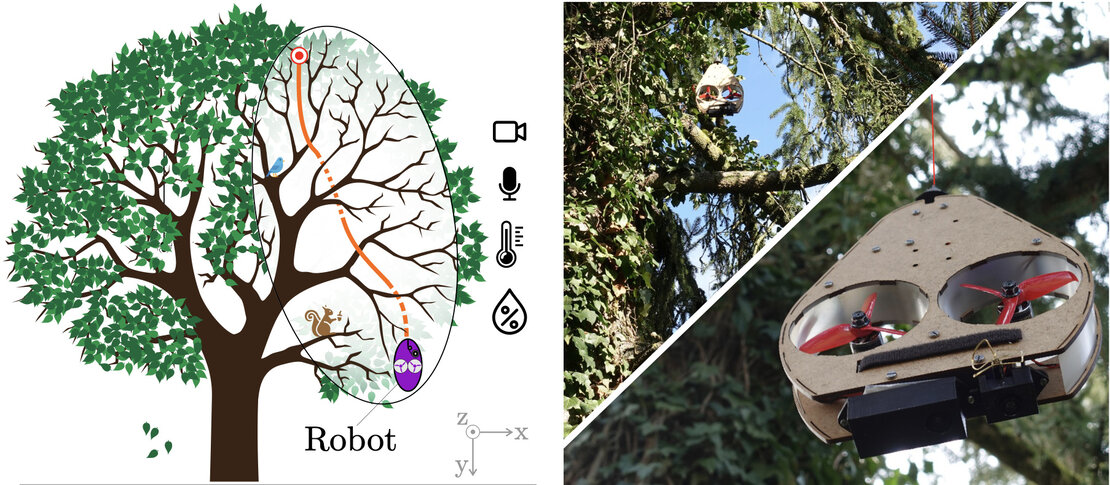
Steffen’s robot achieves multimodal mobility by combining aerial and tethered locomotion. After the robot is deployed at the top of the tree, it can descend with the tether and maneuver around leaves and branches with its thrusters. The tether increases robustness and safety and allows for resting as well as emergency retrieval of the system.

Text: Christian Geckeler
Source: https://erl.ethz.ch/news-and-events/erl-news/2022/11/a-robot-combining-tether-and-aerial-locomotion-to-explore-forest-canopies.html